1 中国科学院福建物质结构研究所光电材料化学与物理重点实验室, 福建 福州 350002
2 中国科学院大学, 北京 100049
3 福州大学化学学院, 福建 福州 350108
精确的简并范围是运用横模频率简并原理产生结构光场的重要条件。本文基于激光频谱研究了共焦腔处于1/2简并态时激光横模频率简并的现象,并提出一种更准确的简并范围测量方法。实验中详细观测输出激光频谱信号随腔长的变化。利用频谱信息,实现了对腔内不同阶横模在发生简并时动力学行为变化的监测。研究结果表明,当腔内不同阶横模发生频率简并时,不同简并族的横模未因模式竞争被抑制,而是共存于腔内。同时,利用激光频谱随腔长的变化,实现了对简并范围更准确的测量。简并过程中重点监测的两个频率信号随着腔进入简并态合并成一个频率信号,该状态在一段腔长范围内稳定存在。据此测得更精确的简并范围,对应腔长约为0.20 mm。此外,对实验中测得的频谱信号进行理论对比,频谱信号的实验值与理论值基本吻合。
激光器 横模 频谱 简并 简并范围 中国激光
2021, 48(20): 2001003
Author Affiliations
Abstract
1 College of Chemistry, Fuzhou University, Fuzhou 350108, China
2 Key Laboratory of Optoelectronic Materials Chemistry and Physics, Fujian Institute of Research on the Structure of Matter, Chinese Academy of Sciences, Fuzhou 350002, China
3 Fujian Science & Technology Innovation Laboratory for Optoelectronic Information of China, Fuzhou 350108, China
4 University of Chinese Academy of Sciences, Beijing 100049, China
5 Collaborative Innovation Center for Optoelectronic Semiconductors and Efficient Devices, Fuzhou 350108, China
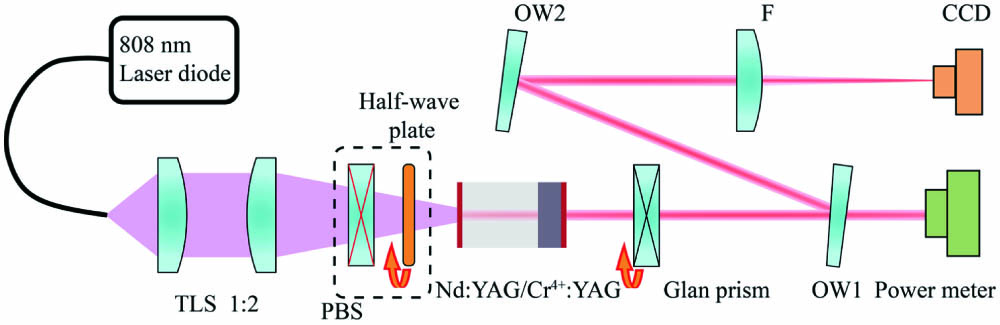
The behavior of self-polarization emission in lasers has been proved in some cases. However, the degree and direction of polarization were often sensitive and unstable. We experimentally observed different beam profiles versus the angle of the polarizer relative to the polarization direction of the laser. In order to explore the polarization mechanism, the dynamics of intracavity polarized eigenmodes was analyzed theoretically. Simulative results were well consistent with our experimental observations. It indicated that the linear self-polarization emission was a composite state rather than an intrinsic state. This study contributed to the improvement of the polarization stability in passively Q-switched lasers.
self-polarization emission polarized eigenmodes coherent combination Chinese Optics Letters
2021, 19(2): 021401
1 四川轻化工大学, 四川 自贡 643000
2 人工智能四川省重点实验室, 四川 自贡 643000
3 徐州工程学院, 江苏 徐州 221000
针对如何快速寻找失踪目标的时空搜索问题, 提出了一种基于递归贝叶斯的搜索决策框架和自适应搜索策略; 在此决策框架中, 考虑了搜索者的速度上限和传感器存在虚警检测与漏报检测等实际因素, 在理论上推导了该决策框架下的置信度函数演化的表达式, 并据此提出了一种有效的搜索策略。由于在该决策框架下能研究和比较不同策略对决策的影响, 这为不同的策略进行分析和比较提供了一个有效的平台。最后, 通过大量的数值仿真验证了该决策框架和所提出的策略的有效性和实用性。
搜索理论 递归贝叶斯 搜索策略 机器人决策 search theory recursive Bayesian method search strategy robot decision-making
1 四川轻化工大学, 自动化与信息工程学院,四川 宜宾 644000
2 四川轻化工大学, 物理与电子工程学院,四川 宜宾 644000
3 徐州工程学院信电工程学院,江苏 徐州 221111
首先给出理想情况下固定翼无人机的姿态动力学模型, 然后在此基础上根据动态逆方法设计出无人机姿态控制器,但基于此控制器并不适合实际情况下的无人机模型, 原因在于无人机实际模型与理想模型之间存在一定的偏移, 即模型不确定, 而且在实际情况中还存在一定的干扰, 因此,在原有无人机姿态控制器的基础上结合模糊神经网络, 来补偿无人机运行过程中存在的模型不确定及干扰。
固定翼无人机 模型不确定性 外部干扰 动态逆 模糊神经网络 fixed-wing UAV model uncertainty external disturbance dynamic inversion fuzzy neural network
1 人工智能四川省重点实验室, 四川 宜宾 644000
2 四川轻化工大学, 自动化与信息工程学院, 四川 宜宾 644000
3 四川省智慧旅游研究基地, 四川 自贡 643000
4 四川轻化工大学, 数学与统计学院, 四川 自贡 643000
5 徐州工程学院信电工程学院, 江苏 徐州 221111
针对四旋翼飞行器轨迹跟踪控制问题, 考虑模型参数不确定的情况, 提出了一种基于收缩理论与反步法的四旋翼飞行器自适应控制算法。首先, 介绍了基于微分几何的收缩理论并给出了四旋翼飞行器的动力学模型; 然后, 提出了一种自适应收缩反步控制方法应用于飞行器跟踪期望轨迹; 最后, 分析了系统的增量稳定性, 证明了系统是误差状态收敛的。积分反步(IB)与自适应收缩反步(ACB)的对比实验表明, 应用此控制算法的飞行器系统鲁棒性更强, 能够精确地完成轨迹跟踪任务。
四旋翼飞行器 反步法 自适应控制 收缩理论 quad-rotor aircraft backstepping method adaptive control contraction theory









